
Engineering
Kalman Filter Explained with MATLAB Code Example
What is the Kalman Filter? How does it work? Learn the theory behind Kalman filtering and see a complete MATLAB implementation for estimating the position of an accelerating object.
AK
Aysegul Karadan
•5 min read
#matlab #engineering #signal-processing #kalman-filter #kalman-filter-matlab #how-kalman-filter-works #state-estimation #kalman-filter-tutorial #kalman-filter-example #control-systems
Kalman Filter Explained with MATLAB Code
The Kalman Filter is a recursive algorithm for estimating the state of a dynamic system from noisy observations. Developed by Rudolf E. Kálmán in 1960, it's widely used in robotics, navigation, aerospace, finance, and more.
What is the Kalman Filter?
The Kalman Filter maintains a probabilistic (Gaussian) estimate of the system state over time, updating recursively with each new measurement using two steps:
Prediction Step
x̂_k|k-1 = F_k * x̂_k-1|k-1 + B_k * u_k
P_k|k-1 = F_k * P_k-1|k-1 * F_k^T + Q_k
Update Step
K = P_k|k-1 * C^T * (C * P_k|k-1 * C^T + R)^-1
x̂_k = x̂_k|k-1 + K * (y_k - C * x̂_k|k-1)
P_k = (I - K * C) * P_k|k-1
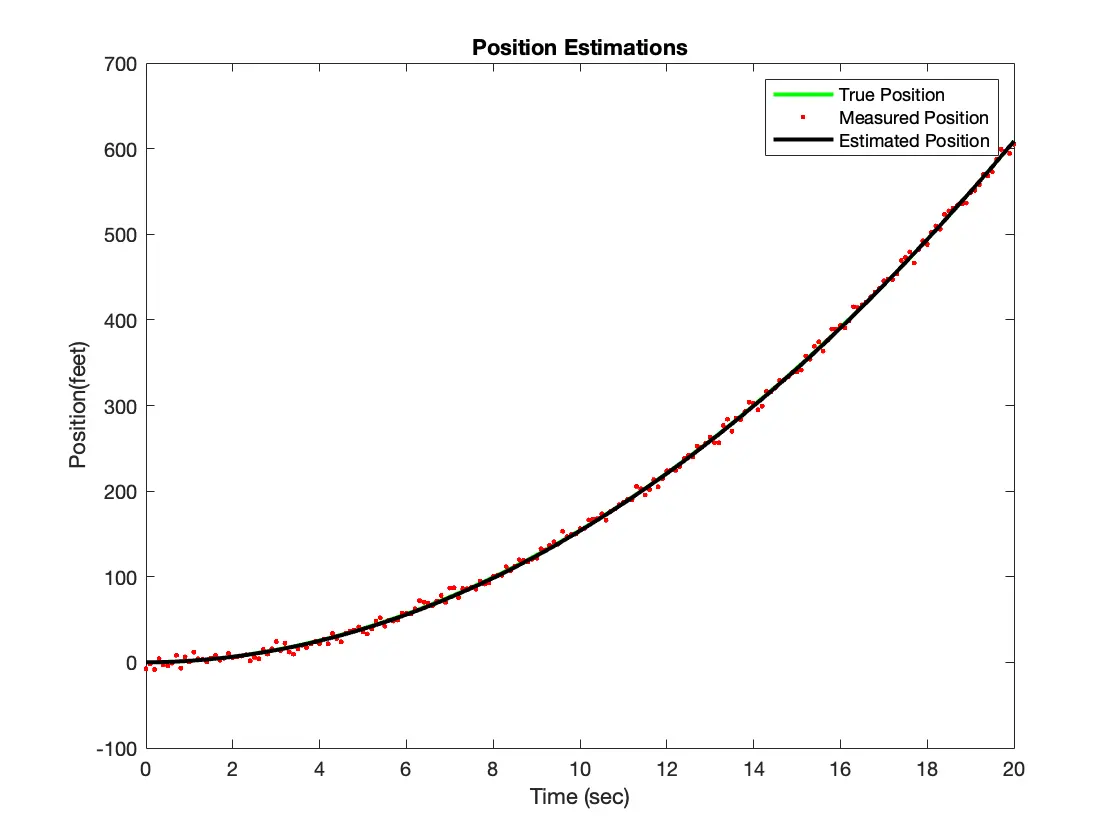
MATLAB Code: Estimating Position with Constant Acceleration
Problem: A vehicle has an acceleration of 3 ft/sec², position measured every 0.1 seconds with 5 ft noise, acceleration noise of 0.1 ft/sec². Estimate position over 20 seconds.
clc; clear;
duration = 20;
dt = 0.1;
measnoise = 5; % position measurement noise (feet)
accelnoise = 0.1; % acceleration noise (feet/sec^2)
A = [1 dt; 0 1]; % transition matrix
B = [dt^2/2; dt]; % input matrix
C = [1 0]; % measurement matrix
x = [0; 0]; % initial state
xhat = x; % initial estimate
Sz = measnoise^2;
Sw = accelnoise^2 * [dt^4/4 dt^3/2; dt^3/2 dt^2];
P = Sw;
tpos = []; poshat = []; posmeasured = [];
for t = 0:dt:duration
u = 3; % constant acceleration
ProcessNoise = accelnoise * [(dt^2/2)*randn; dt*randn];
x = A*x + B*u + ProcessNoise;
MeasNoise = measnoise * randn;
y = C*x + MeasNoise;
xhat = A*xhat + B*u;
Inn = y - C*xhat;
s = C*P*C' + Sz;
K = A*P*C' * inv(s);
xhat = xhat + K*Inn;
P = A*P*A' - A*P*C'*inv(s)*C*P*A' + Sw;
tpos = [tpos; x(1)];
posmeasured = [posmeasured; y];
poshat = [poshat; xhat(1)];
end
t = 0:dt:duration;
figure;
plot(t, tpos, 'g', 'LineWidth', 2); hold on;
plot(t, posmeasured, 'r.', 'LineWidth', 2);
plot(t, poshat, 'k', 'LineWidth', 2);
title('Position Estimations');
xlabel('Time (sec)'); ylabel('Position (feet)');
legend('True Position', 'Measured Position', 'Estimated Position');
Applications
- Navigation & GPS systems
- Robotics and autonomous vehicles
- Aerospace and flight control
- Financial time series estimation
- Signal processing and sensor fusion
References
- R. E. Kalman, "A new approach to linear filtering and prediction problems," ASME Journal of Basic Engineering, 1960.
- G. Welch & G. Bishop, "An introduction to the Kalman filter," UNC Chapel Hill, 2006.